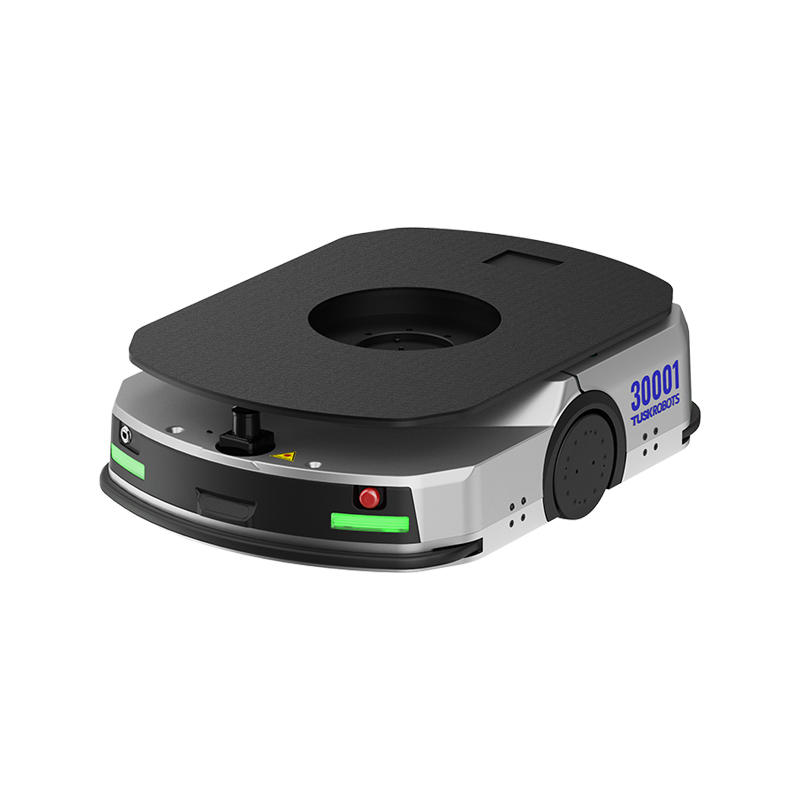
Industrial handling robots are able to avoid pedestrians and vehicles in dynamic environments, mainly due to their advanced sensor technology, intelligent algorithms, and autonomous navigation capabilities.
In a dynamic environment, industrial handling robots use various sensors (such as LiDAR, visual sensors, ultrasonic sensors, infrared sensors, etc.) to perceive the surrounding environment in real time and obtain information such as the position, speed, and direction of movement of pedestrians and vehicles. These sensors can cover different detection ranges and angles, providing multi-dimensional environmental data and reliable basis for robot decision-making. For example, LiDAR can accurately measure the distance and contour of obstacles, visual sensors can recognize the shape, color, and motion status of objects, and ultrasonic sensors are good at detecting obstacles at close range.
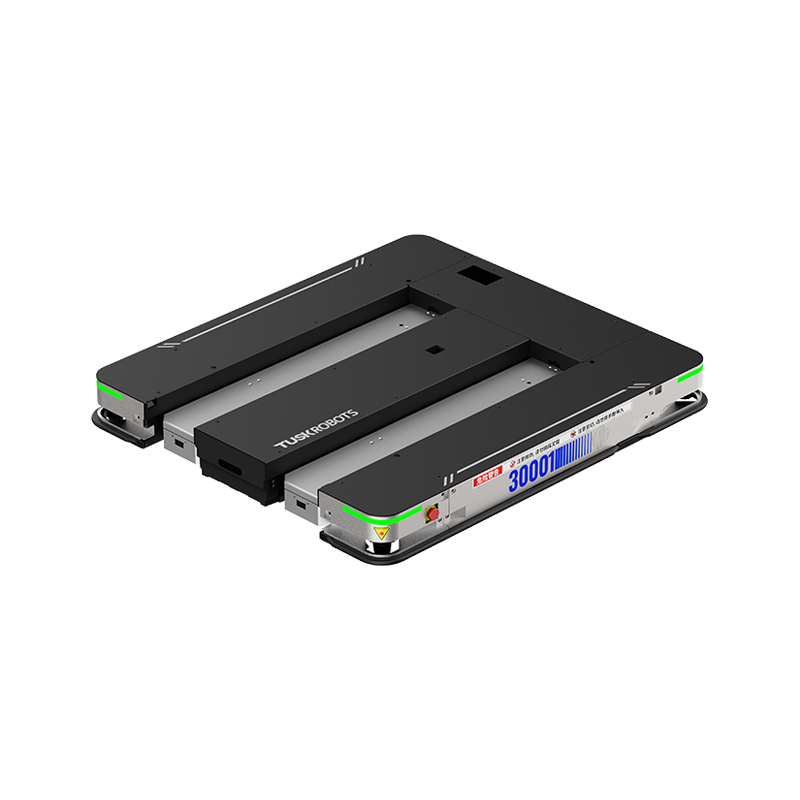
Based on information obtained from sensors, robots use intelligent algorithms to perform real-time analysis and processing of the environment. Through machine learning and deep learning techniques, robots can recognize the behavior patterns of pedestrians and vehicles, predict their motion trajectories, and make reasonable obstacle avoidance decisions based on this. For example, when a pedestrian or vehicle suddenly approaches, the robot will quickly adjust its motion path, slow down, stop, or detour to avoid collision.
At the same time, industrial handling robots have autonomous navigation capabilities and can plan optimal paths in complex environments. By combining high-precision maps and positioning technology, robots can update their position information in real time and dynamically adjust their driving routes based on environmental changes. During the obstacle avoidance process, the robot will comprehensively consider various factors such as task priority, path length, safety, etc., and choose the most suitable obstacle avoidance strategy to ensure efficient and safe completion of the handling task.
 Marketing Department Email
Marketing Department Emailmarketing @tuskrobots.com
 Human Resources Email
Human Resources Emailhr @tuskrobots.com
Product & Solution Enquiries info @tuskrobots.com
 Inquiry
Inquiry +86-400-8808-310






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어