1. Photoelectric sensor detection
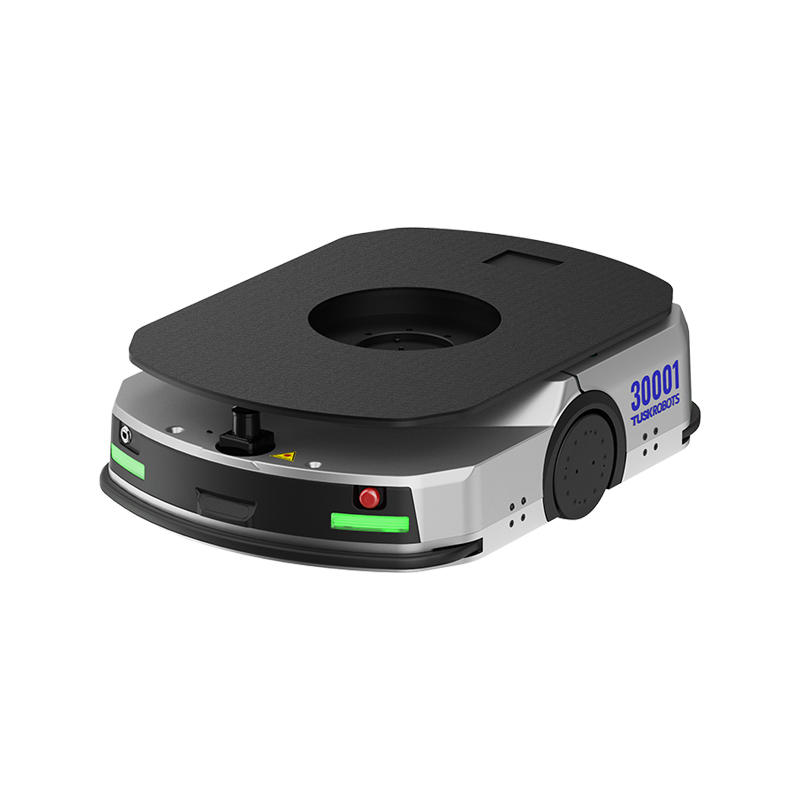
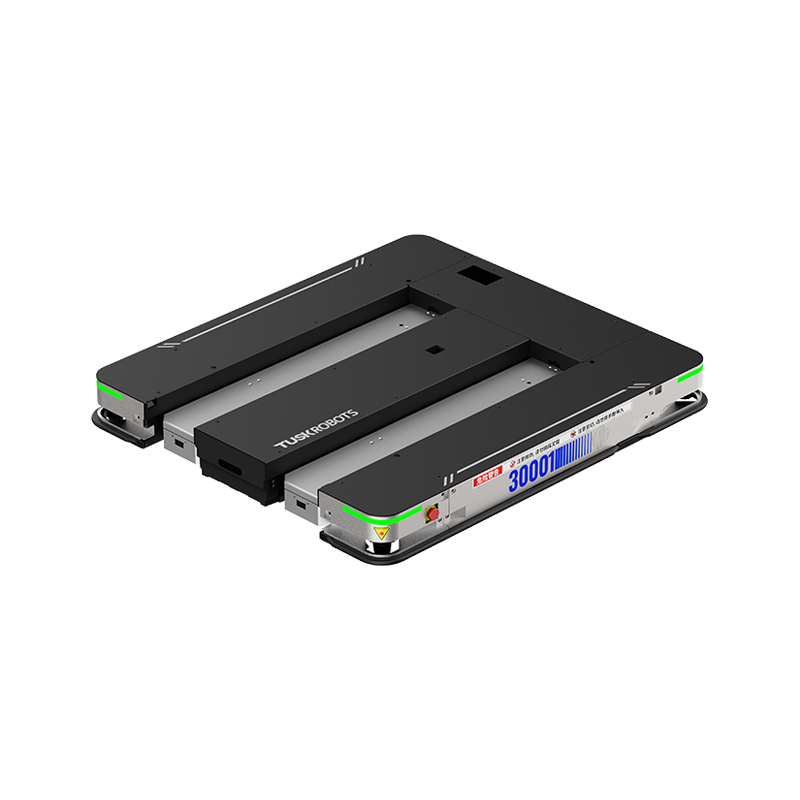
The E10 industrial robot is equipped with a photoelectric sensor, which is located near the fork tip and is used to detect the distance between the fork tip and surrounding objects in real time. When the distance is detected to be less than the preset safety value (usually less than or equal to 100mm), the sensor will immediately send a signal to trigger the robot's protection mechanism.
2. Collision switch
In addition to the photoelectric sensor, the E10 robot is also equipped with a collision switch at the fork tip. When the fork tip collides with an object, the collision switch will respond quickly and also trigger the protection mechanism. This design ensures that if the photoelectric sensor fails to detect an obstacle in time, the robot can still achieve an emergency stop through the collision switch to avoid damage to surrounding objects or itself.
3. Implementation of the protection mechanism
When the photoelectric sensor or collision switch triggers the protection mechanism, the E10 Industrial Pallet Handling Robot will immediately stop the current action and may issue an alarm or light signal to alert the operator. At the same time, the robot may also enter a safe mode to restrict its further actions until the operator confirms and clears the alarm.
4. Operator monitoring and intervention
Although the E10 robot is equipped with an advanced fork tip protection system, operator monitoring and intervention are still essential. The operator needs to pay close attention to the robot's operating status and manually intervene when necessary to ensure the safe progress of the handling operation.
 Marketing Department Email
Marketing Department Emailmarketing @tuskrobots.com
 Human Resources Email
Human Resources Emailhr @tuskrobots.com
Product & Solution Enquiries info @tuskrobots.com
 Inquiry
Inquiry +86-400-8808-310






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어