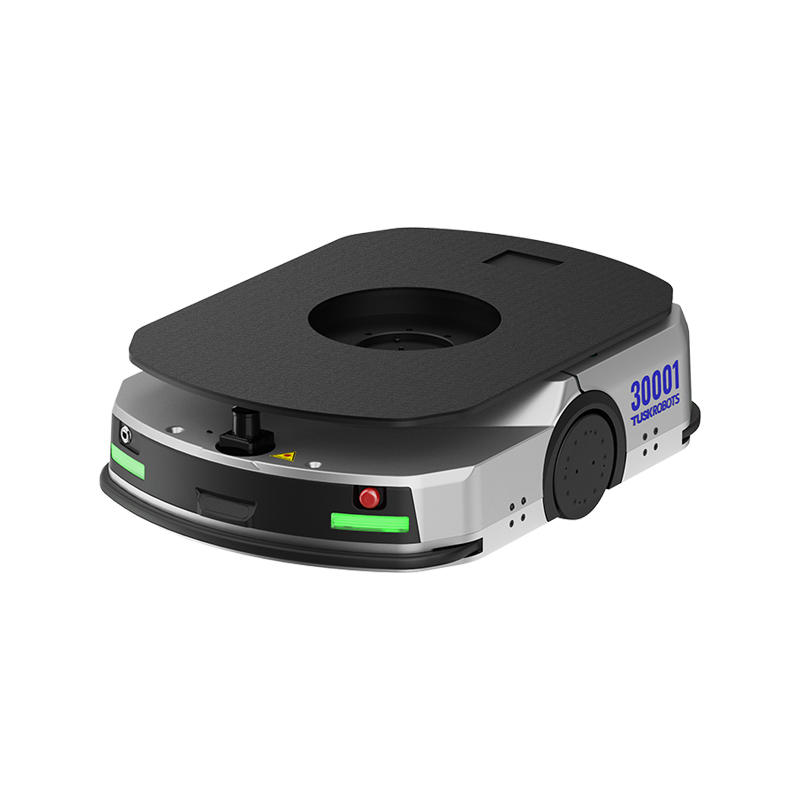
Industrial handling robots can indeed measure the distance between robots and objects. This feature typically relies on various sensors installed on the robot, including but not limited to ultrasonic sensors, LiDAR sensors, visual sensors, and infrared sensors.
Ultrasonic sensors measure the time difference between the emission of ultrasonic waves and the reception of reflected waves, combined with sound velocity to calculate distance. They are suitable for close range measurements and are insensitive to environmental light.
Lidar sensors use laser beams for high-precision ranging, which can perceive real-time three-dimensional information of the surrounding environment. They are very suitable for distance measurement and obstacle avoidance in complex environments.
Visual sensors can recognize objects and calculate their distance by capturing images and analyzing them, especially under conditions of sufficient lighting and obvious environmental features.
Infrared sensors measure distance by emitting infrared light and receiving reflected light. Although they are greatly affected by the environment, they can still provide effective distance information under specific conditions.
In practical applications, industrial handling robots will select appropriate sensor combinations based on task requirements and working environments to achieve accurate measurement of the distance between the robot and objects. These sensor data will be processed in real-time by the robot control system for path planning, obstacle avoidance, and precise control of the interaction process between the robot and objects, ensuring safe and efficient handling operations.
 Marketing Department Email
Marketing Department Emailmarketing @tuskrobots.com
 Human Resources Email
Human Resources Emailhr @tuskrobots.com
Product & Solution Enquiries info @tuskrobots.com
 Inquiry
Inquiry +86-400-8808-310






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어