Industrial handling robots can indeed be adjusted based on real-time sensor data and feedback information. This ability is an important manifestation of the intelligence and automation of modern industrial robots.
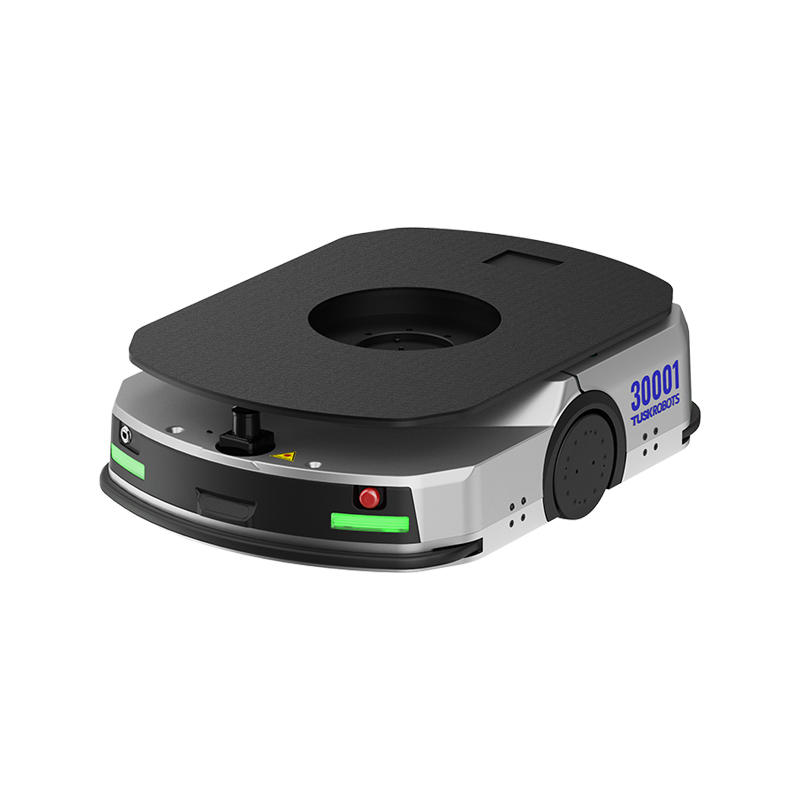
When performing handling tasks, the handling robot will use various sensors installed on the robot body, such as cameras, laser scanners, inertial measurement units (IMUs), etc., to monitor and perceive the surrounding environment in real time. These sensors can obtain a large amount of data about the working environment, material location, movement status, and potential obstacles.
Through computer programs and advanced algorithms, transport robots are able to process and analyze sensor data. Data processing may include steps such as filtering, denoising, and signal enhancement to improve the accuracy and reliability of the data. Then, the robot will generate corresponding control instructions based on this data to adjust its motion trajectory, speed, acceleration and other parameters, ensuring the precise execution of the handling task.
In addition, the handling robot also has the ability to learn and optimize. By collecting and analyzing historical data, robots can continuously optimize their control strategies and algorithms, improving handling efficiency and accuracy. At the same time, robots can also dynamically adjust based on real-time feedback information to cope with sudden environmental changes or task changes.
In summary, industrial handling robots can adjust based on real-time sensor data and feedback information to ensure the smooth completion of handling tasks. This ability not only improves handling efficiency and accuracy, but also enhances the adaptability and flexibility of the robot, enabling it to operate stably in various complex and changing work environments.
 Marketing Department Email
Marketing Department Emailmarketing @tuskrobots.com
 Human Resources Email
Human Resources Emailhr @tuskrobots.com
Product & Solution Enquiries info @tuskrobots.com
 Inquiry
Inquiry +86-400-8808-310






 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어