Industrial handling robots can monitor the status of the objects they are handling. This is mainly due to the combined application of robot technology, sensor technology, and computer vision technology.
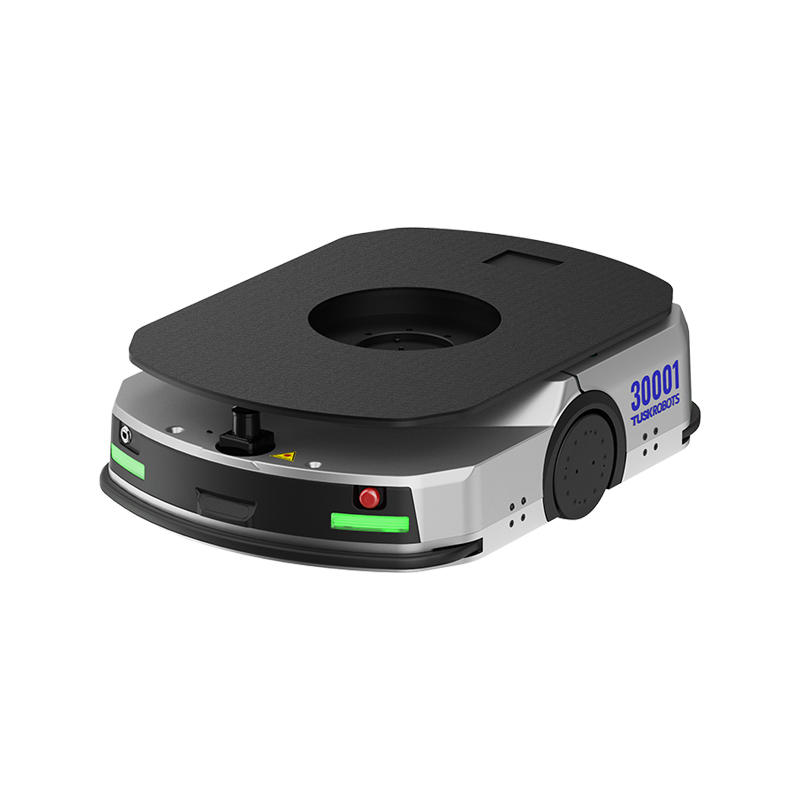
Firstly, industrial handling robots are usually equipped with various sensors, such as force sensors, position sensors, etc. These sensors can detect the position, posture, and force conditions of objects in real-time during the handling process. Through these data, robots can determine whether objects are in a stable state, whether they are likely to slip or tilt, and take corresponding measures to ensure the safety and stability of the transportation process.
Secondly, computer vision technology has also been widely applied in industrial handling. Through cameras and image processing algorithms, robots can recognize the shape, size, color, and other characteristics of objects, and track their motion trajectories. In this way, robots can more accurately locate objects, avoiding collisions or damage to objects during transportation.
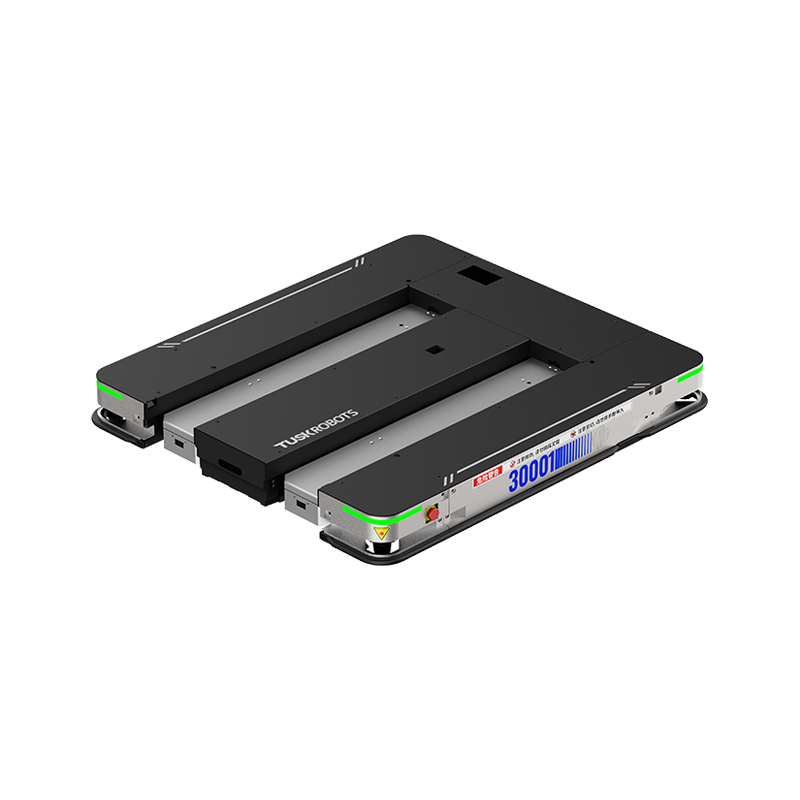
In addition, some advanced industrial handling robots also have self-learning capabilities. They can gradually improve the accuracy and efficiency of moving objects through continuous learning and optimization. This ability enables robots to adapt to objects of different shapes, sizes, and weights, achieving more intelligent handling.
 Marketing Department Email
Marketing Department Email Human Resources Email
Human Resources Email Inquiry
Inquiry 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어